Люди с бионическими конечностями сегодня пока ещё выглядят немного фантастично.
Отрасль, создающая искусственные органы и конечности, штурмует всё новые рубежи. Вскоре её новейшие достижения выйдут из стен ведущих лабораторий и компаний, разрабатывающих роботизированные протезы, и предстанут перед зрителями на специализированном соревновании — Кибатлоне. Откуда взялась такая необходимость и в чём суть соревнования, мы и постараемся разобраться.
Представьте себе ситуацию: вы опытный велосипедист, возможно, велогонщик. Ежегодно вы проезжаете несколько тысяч километров на своём двухколёсном друге. Но случается неприятность: вас сбивает машина или вы срываетесь с обрыва, или просто неудачно падаете — травма вам обеспечена. Может быть, вам повезёт, и вы отделаетесь ушибом, а если сломанные кости или порванные сухожилия? Есть и более страшные травмы, связанные с повреждениями позвоночника, — их столь же легко получить за рулём, на производстве, на операционном столе. После них человек вынужден пересесть в инвалидную коляску и навсегда забыть о том, что когда-то был свободен в движениях.
Ещё не так давно это был бы приговор. Сейчас же человеку даже после тяжелейшей травмы можно снова вернуть возможность ездить на велосипеде. К услугам пострадавших не только современные достижения в области нейрохирургии и нейротерапии, но также пришедшие из военной отрасли экзоскелеты и разработанные на гражданке нейропротезы (правда, без военных и космоса дело и тут не обошлось). И для того, чтобы их продемонстрировать, 8 октября 2016 года в Швейцарии стартует Кибатлон.
Нейропротезирование на марше
В сети довольно много видео, показывающих эксперименты парализованных людей по управлению нейропротезами. Чтобы это вообще стало возможным, учёным понадобилось довольно долго экспериментировать. За последние 15 лет были достигнуты хорошие результаты: крыса, снабжённая нейроинтерфейсом, смогла роботизированной рукой нажать на переключатель; обезьяны при помощи мозговых компьютерных интерфейсов смогли играть в видеоигры. Наконец, парализованный человек смог управлять нейропротезом, просто подумав о его перемещении. Впечатляющее достижение для отрасли, которая буквально на наших глазах хвасталась тем, что смогла при помощи внешнего чипа управлять относительно просто кодируемыми перемещениями таракана.
И всё же тут есть одна сложность: перемещение протеза происходит тогда, когда на него смотрят. Человек должен полностью сосредоточиться на перемещении объекта. Это не только физически затруднительно и выматывает, перемещение происходит медленно. Проблема в том, что человек не чувствует состояние перемещаемого объекта, у него нет с ним обратной связи. Именно это, вместе с неудобством управления, сдерживает массовое внедрение такого рода устройств. Потерявший конечность, например, руку, человек начинает сталкиваться с тем, что из-за отсутствия чувствительности у протеза, любые его действия могут быть сопряжены с разрушениями — ломаются предметы обихода, портится еда, — использование становится неудобным.
Для решения этой проблемы нейропротезы начинают делать двунаправленными: теперь человек не просто отдаёт протезу команду, но и чувствует, что с ним происходит во время её выполнения. Для этого необходимо, с одной стороны, понять, какие участки мозга что «чувствуют» при совершении разных действий, а с другой — научиться передавать «чувства-сигналы», снятые с выполняющего определённую команду протеза, прямо в мозг человека, управляющего им. Не самая тривиальная задача, и исследователи пытаются решить её разными способами: стимуляцией нервов потерянной (не работающей) конечности, перенаправлением нервных импульсов в другую часть тела, откуда уже можно снимать и обрабатывать сигнал, и, наконец, прямой передачей сигналов в мозг. В любом случае, именно этот этап был объявлен многими исследователями важнейшим, позволяющим приблизиться к решению задачи создания полнофункционального протеза, чья работа походила бы на работу естественной конечности.
Имеющиеся на данный момент протезы снабжены «обратной связью», даже самые простые: человек всегда может почувствовать давление в части соединения протеза с телом и таким образом понять, пусть и косвенно, что с ним происходит. Для тех, кто использует моторизованные протезы, ситуация ещё больше облегчается: управляя протезом при помощи мускульных импульсов, люди не только чувствуют давление в месте соединения протеза и тела, но и слышат изменения в работе мотора, когда протез что-то захватывает или перемещает. Несколько лет назад разработчики предлагали также использовать в виде обратной связи стимуляцию нервов в месте соединения, вибрацию и/или давление воздуха.
Проблема в том, что всё это неестественно для человека, протез не ощущается частью тела. Поэтому реализация обратной связи — трудная задача. По существу, необходимо не просто воссоздать «проприоцепцию» — чувство нахождения конечности в пространстве, — но и записать её в необходимые участки мозга. И если первый вопрос технически решаемый — современные протезы оснащены кучей датчиков, которые позволяют это сделать, — то вот со вторым — проблема.
Вот, например, как это было решено в Университете штата Юта: электроды присоединялись к нервам в месте соединения протеза, а потом происходила стимуляция нервных окончаний с помощью слабых электрических токов. Таким образом, пациент ощущал, будто бы его пальцы двигаются или даже что-то трогают. Хорошо, а как почувствовать, что именно вы трогаете и переносите? Нужно проанализировать усилие, которое прикладывают пальцы протеза, и их положение в пространстве. Далее это анализирует компьютер, и уже затем происходит очередная стимуляция нервов. По этому пути пошли во Флоридском международном университете (Florida International University, FIU) в Майами. Другие исследователи решили отказаться от стандартных электродов, боясь того, что они так или иначе повредят нервы, и создали вместо этого электрод-манжету, которая оборачивается вокруг нерва. Испытания подобного электрода, разработанного в CWRU, прошли успешно.
Какими бы многообещающими ни были полученные результаты, необходимо принять во внимание то, что разработчикам необходимо стимулировать сотни нервных окончаний, чтобы симулировать ощущения, которые испытывает человек с нормальной рабочей конечностью. Кроме всего прочего, протез должен работать действительно долго. Ведь в случае, когда он соединён непосредственно с нервами, для его замены приходилось бы раз за разом прибегать к хирургической операции. Чтобы избежать этих проблем, другие разработчики решили, что сенсорная отдача должна происходить через кожу.
Разработке этого метода помог случай. В 2002 году, в Центре бионической медицины при Чикагском институте реабилитации для одного из пациентов была разработана процедура «целевой иннервации» мышц груди. Вместо стимуляции нервного окончания в месте присоединения протеза было решено «перенаправить» его в мышцы груди. Таким образом, пациент думал о перемещении протеза конечности, но иннервации подвергались нервы грудных мускулов. Эксперимент закончился успехом и, к удивлению многих, пациент смог не только перемещать протез, но и чувствовать прикосновение протеза к предмету так, как будто кто-то касался его груди. Выяснилось, что хотя иннервации подверглись часть кожных нервов, мозг воспринимал полученные импульсы как прикосновение ладони и пальцев.

Разработанный для DARPA протез руки с обратной связью, симулирующий чувствительность ладони и пальцев.
Этот метод, при всём новаторстве, не идеален, сильно зависит от каждого конкретного случая (люди не являются точными клонами друг друга, расположение нервных окончаний индивидуально, спектр нервных импульсов индивидуален, так что в каждом новом случае пришлось бы производить подгонку нейропротеза под пациента), а область стимуляции ограничена небольшим участком кожи. Тем не менее, некоторые фирмы (например, HDT Robotics) уже сейчас разрабатывают подобные протезы.
Однако ни одна из перечисленных технологий не способна улучшить положение парализованных пациентов, у которых из-за травм или чего-то другого разорваны нервные связи между мозгом и телом. Поэтому некоторые исследователи пришли к выводу о необходимости прямой стимуляции нейронов той части мозга, которая в естественном состоянии отвечает за необходимую конечность или её часть.
Сделать это чрезвычайно сложно, потому что на данный момент точно не вполне известно, какие именно это нейроны. А значит, возможны варианты: идентифицировать их и имитировать импульсы или же научить необходимой реакции произвольные нейроны мозга.
В первом случае, экспериментаторы помещают обезьяне в мозг электроды и, например, заставляют её отслеживать глазами какой-либо предмет. Информация об этом записывается, анализируется, а после, исследователи пытаются стимулировать именно те участки/нейроны в её мозге, которые были активны во время отслеживания предмета. Согласно одному из докладов, уже в 2012 году исследователи из Чикагского университета сумели практически реализовать этот метод.
Второй случай напоминает выработку условного рефлекса. В медшколе Университета Дюка обезьяны, перемещая виртуальную конечность, которая захватывала на экране объекты разной формы, получали стимуляцию определённых нейронов головного мозга. Низкочастотную, если они захватывали предмет с грубой рельефной поверхностью, и высокочастотную, если он был гладкий. Со временем обезьяны быстро выучились выбирать соответствующий предмет в зависимости от частоты поданных для возбуждения нейронов импульсов. Более того, их научили чувствовать выбираемые предметы — грубые они или же гладкие.
Однако ни в первом, ни во втором случае не было понятно, что же конкретно испытывали обезьяны, и насколько это было для них естественно.
Безотносительно того, какие сигналы для иннервации используются, исследователям и изобретателям необходимы более точные инструменты. Какими бы точными, миниатюрными и острыми ни были электроды, они стимулируют абсолютно все нейроны, расположенные близко к ним. Это может привести к непреднамеренным последствиям, когда чувство или движение, которое должно возникнуть, скажем, в большом пальце, внезапно возникнет в мизинце или безымянном.
Поэтому некоторые исследователи пошли ещё дальше и стали использовать оптогенетику, вводя белки, чувствительные к свету, непосредственно в те участки мозга, которые должны были подвергаться стимуляции. Эксперимент, как обычно проводимый на обезьянах, вначале обучал тех совершать ряд действий, которые бы стимулировали участки мозга, в которые были введены протеины, а потом происходила стимуляция данных участков при помощи источника света, вмонтированного в череп обезьяны. Обезьяны совершали необходимые действия в 90 процентах случаев. Однако сколь бы многообещающей ни была эта стратегия, реальные достижения, по мнению учёных, будут видны только лет через 10—20.
Естественность ощущений
Даже если подобные технологии заработают уже завтра, не ясно, насколько сильно они смогут приблизиться к имитации естественных ощущений. Некоторые исследователи полагают, что до новой «искусственной естественности» путь предстоит неблизкий. В тоже время другие настаивают на том, что пациентам не особенно нужна именно такая исключительная естественность ощущений.
Многим из них просто необходимы удобные в использовании нейропротезы. Например, пациенты, носящие кохлеарные импланты, рады уже тому, что могут различать человеческую речь и что-либо слышать, даже если не могут разобрать тонкости звучания музыкальных произведений.
В то же время военные не жалеют денег на совершенствование интерфейсов. В рамках только одной из исследовательских программ Минобороны США было потрачено более 140 миллионов долларов за несколько лет на разработку навороченного протеза, оснащённого более чем сотней датчиков, которые должны позволить добиться естественных ощущений для носителя протеза.
Популярность управляемых и стимулирующих мозговую активность нейропротезов растёт, однако регуляторы, и не только в США, пока не особо охотно дают разрешение на использование такого рода устройств в медицинских целях. В тоже время, процесс начался и дальше пойдёт быстрее, тем более что результаты уже впечатляют.

После вживления системы имплантов, обеспечивших двунаправленную связь между мозгом и мускулами, парализованный Иэн Беркхарт смог двигать отдельными пальцами и совершать шесть различных движений предплечьем и кистью.
Так, апрель 2016 года принёс интересную и обнадёживающую новость: человеку с параличом всех конечностей сумели частично вернуть двигательную активность. Иэну Беркхарту из города Дублин (штат Огайо), вживили систему имплантов, которые обеспечили двунаправленную связь между его мозгом и мускулами. Система позволила юноше со сломанным позвоночником реанимировать свою правую руку, запястье и пальцы. Работы под руководством Чеда Баутона (Chad Bouton) из Института медицинских исследований Файнстайна (Feinstein Institute for Medical Research) велись на протяжении двух лет.
Во время предшествующих исследований был сделан вывод о том, что после повреждения позвоночника человеческий мозг перестраивает свои нейронные связи. Новая работа позволила уточнить, что степень перегруппировки ниже, чем предполагалось. Это дало надежду предположить, что изменений не настолько много, чтобы нельзя было обойти повреждённые участки спинного мозга для восстановления движения. Как мы уже знаем, подобный обход уже производился ранее, в частности на обезьянах. Это использовалось для перемещения нейропротезов. Однако впервые при помощи такой технологии у человека была реанимирована его собственная часть тела.
Как этого удалось добиться? Батон и его коллеги сделали Беркхарту функциональное магнитно-резонансное сканирование (ФМРС) мозга в тот момент, когда он представлял себе движение рук. Это позволило точно определить зону двигательного кортекса и связать отдельные её участки с этими движениями. Хирургическим образом имплантированный чип позволял выделить определённый паттерн сигналов, который проявлялся только тогда, когда пациент начинал думать и представлять конкретную двигательную активность (в данном случае — движение рукой). Имплантированный чип был подсоединён к компьютеру, на который вся эта информация записывалась. Собранная информация обрабатывалась при помощи алгоритмов машинного обучения, после чего преобразовывалась в последовательность электрических импульсов, которые подавались на гибкие манжеты, надетые Беркхарту на правую руку и стимулирующие её мускулы. Буквально в первый же день, когда их подключили, пациент смог совершать движения и сжимать ладонь.
Итог многочисленных тренировок — Беркхарт смог реанимировать движение отдельных пальцев правой руки и несколько движений рукой и запястьем. Он научился не только брать стакан воды, но даже играть в видеоигру.
Проведённое исследование вдохновляет, поскольку получается, что, несмотря на повреждение позвоночника и разрыв нервных связей с конечностями, мозг не успел в течение нескольких лет перестроить уже «настроенные» участки. Они и через несколько лет после травмы отвечали за движение рук.
Более того, через несколько лет после травмы, при практически полном параличе, мозг Беркхарта сумел научиться координировать действия своей реанимированной руки. Чем дольше и больше он учился ею управлять, тем лучше становилась эта координация, тем увереннее движения. Разработанный Батоном машинный алгоритм учитывал эти изменения и гибко приспосабливался, делая движения пациента всё более и более точными.
Есть и сложности. Система является лабораторной и при каждом запуске требует перекалибровки. Однако это процесс чисто технический, и его надеются, в конце концов, решить.
Кроме того, Беркхарт не чувствует объекты, которыми манипулирует. Таковую возможность ему можно было бы попытаться обеспечить, например, при помощи кожной иннервации, о которой писалось выше.
Однако до сих остаётся вопрос, что делать в случае полного паралича, когда человек не может пошевелить ни единым мускулом?
Кибатлон, конечно же, не может ответить на этот вопрос. Тем не менее, привлекая внимание к проблемам инвалидов, к тому, с чем им ежечасно приходится иметь дело, соревнование может способствовать более активному решению этих проблем. И тогдаВ Кибатлоне примут , через какое-то время, быть может, сломанный позвоночник, потерянная конечность, дегенеративные нервные заболевания, параличи перестанут быть стигмой, из-за которой человека рассматривают как неполноценного.
Рождение киборгов
Собственно, именно из-за соединения человеческого тела и нейропротезов и родился термин киборгизация, который отлично подходит для описания того, в каком направлении движется протезирование человеческих конечностей: прямое соединение с человеческой нервной системой (в первую очередь, с периферической), исследование мозговых интерфейсов, выделение шаблонов (паттернов) сигналов нервной активности при совершении различных движений, создание алгоритмов быстрого машинного обучения, для того, чтобы приспособить нейропротезы к индивидуальным особенностям каждого человеческого тела.
Но, несмотря на активно ведущиеся исследования, у всех у них были минусы. Они не были стеснены либо весовыми и габаритными ограничениями, либо — экономическими соображениями. Это привело к тому, что стоимость удобных нейропротезов зашкаливает за отметку в несколько десятков тысяч долларов. Это резко ограничивает возможность их массового применения. Отсутствие же массового применения задаёт ограничение по задачам, которые должны решать нейропротезы. Как следствие, они оказываются не просто дорогими, но и не вполне удобными для своих носителей. А «гражданские» — по сравнению с военными аналогами — ещё и маломощными. К примеру, функционально-электрическая стимуляция (FES), которая основана на снятии мышечного электроимпульса для контроля и координации движения конечностей, в частности ног, в гражданском варианте для велосипедистов даёт не более 20 Вт производимой мощности. Это всего лишь 1/10 часть того, что производит натренированный велосипедист, когда крутит педали. И все же, даже эти скромные результаты открывают громадные возможности для тех, кто был слишком долго лишён любой возможности двигаться.
Машинное обучение
В Кибатлоне примут участие 80 исследовательских групп из 25 стран. Они представляют весь спектр современной индустрии — от маленьких стартапов, до крупнейших мировых производителей навороченнейших протезов. В их состав входят примерно 300 учёных-исследователей, инженеров, членов служб поддержки и, наконец, участников соревнований. Последним предстоит соревноваться в шести дисциплинах, которые прежде всего подразумевают способность совершать столь привычные для многих, рутинные действия.

Одно из соревнований обладателей ручных протезов на Кибатлоне в Швейцарии, в июле 2015 года.
Соревнования среди тех, у кого ручные нейропротезы, будут одними из первых. Участники будут соревноваться, например, в приготовлении еды. Обладателей ножных протезов ждёт состязание по преодолению лестничных ступенек и т. д.
Место проведения Кибатлона — цюрихский хоккейный стадион на 7600 зрителей. Организаторы соревнований надеются привлечь к мероприятию такое же внимание, как и к Паралимпийским играм, поэтому недостатка в репортёрах не будет. По крайней мере, так обещают.
Разница в том, что Паралимпийские игры прославляют пусть искалеченное, но человеческое тело атлетов, которых снабжают коммерчески доступными протезами и устройствами. Кибатлон же основной упор делает именно на технологиях и технических новинках. Поэтому, участников соревнований здесь называют пилотами — по аналогии с испытателями техники, — а не атлетами.
Большинство кибатлонистов будут соревноваться, используя протезы, буквально вчера вышедшие из недр лабораторий. Поэтому многие надеются, что устройства и технологии, испытанные в соревнованиях, ускорят разработки новых нейропротезов, и, в конечном счёте, это поспособствует массовому внедрению новинок по всему миру.
Ежедневные задачи, в которых будут соревноваться пилоты, по словам Роберта Ринера (Robert Riener), инженера в области биомедицинских технологий из Швейцарской высшей технической школы Цюриха (нем. Eidgenössische Technische Hochschule Zürich), а по совместительству создателя Кибатлона, лёгкими только кажутся. В этом с ним нельзя не согласиться: многие стандартные для нас действия — удержать равновесие на скользкой поверхности, быстро нарезать пищу, одеться, почистить зубы и даже сходить в туалет — для многих инвалидов являются сложнейшими.
В определённом смысле мы все избалованы современной культурой «супертела у суперлюдей», которую можно найти в любом современном блокбастере. Представить, что для большого количества людей каждый прожитый день — это адский труд и подвиг — сложно, но можно. Сама концепция Кибатлона в прямом смысле слова выросла именно из такого героизма. В 2012 году Зак Воутер (Zac Vawter), потерявший ногу в мотоциклетной аварии, использовал экспериментальный ножной протез, чтобы забраться на 103-й этаж Виллис Тауэр (Чикаго) за 45 минут. «Да, я могу», — ясно читалось в произошедшем, это приковало внимание прессы, а через неё — и исследователей. Именно это событие вдохновило Ринера на организацию Кибатлона: почему бы не устроить соревнования, открытые для всех, кто участвует в разработке протезов, где внимание было бы приковано к технологии, а не к участнику соревнования?
Ринер просто предложил это в своей лаборатории. Идея всем понравилась и вскоре зажила своей жизнью.
Поначалу Кибатлон предполагалось сделать похожим на состязания паралимпийцев. Например, восхождение на гору при помощи ножных или ручных протезов. Однако в дальнейшем решение изменилось под воздействием более близкого знакомства организаторов с реальными проблемами большинства владельцев протезов: неудобство их ношения, проблемы с использованием и настройкой, проблемы с управлением. Все это вместе взятое привело к тому, что с олимпийских небес единиц было решено спуститься на землю миллионов. Ведь разрешение ежедневных проблем более важно, чем разработка очередного крутого протеза для спринтера, который бы просто стал бегать быстрее всех на свете. Так Кибатлон стал принципиально не олимпийским.
Мощь мозга
Пожалуй, самой странным соревнованием на Кибатлоне будет испытание интерфейса мозг — компьютер (или просто, мозгового интерфейса), в котором примут участие 15 пилотов. В течение четырёх минут, пока они будут соревноваться, на громадных экранах арены будет спроецировано то, что происходит в их головах. Суть состязания в следующем: каждый из соперников будет при помощи своего мозга управлять объектом на экране. Задача будет заключаться в том, чтобы объект дошёл до финиша, обойдя многочисленные препятствия. Для этого используется анализ паттернов мозговой активности участников, которые должны отдавать объекту ровно три команды: ускориться, перепрыгнуть через шипы, проехать под лазерными лучами.

На соревнованиях интерфейсов мозг — компьютер.
В качестве паттернов может выступать что угодно. Например, в Эссекском университете (University of Essex) в Колчестере (Англия), исследователи под руководством Аны Матран-Фернандес (Ana Matran-Fernandez) придумали алгоритм, который очень упрощает людям эту ментальную работу. Они связали выполнение команд с мыслями пилота о своей руки или ноге. Обычно чтобы выполнить ускорение, прыжок или уклонение, требуется полная концентрация на задаче. Но мысли о своих руках-ногах настолько просты и естественны, что пилот может управлять объектом, одновременно выполняя в уме математические вычисления. Точно так же, как в обычной жизни мы можем одновременно размышлять о чем-то своём и обходить препятствия.
Дело в том, что электрические сигналы слабые, к тому же они отличаются у каждого человека. Поэтому в каждом отдельном случае придётся настраиваться на индивидуальные особенности (это обусловлено индивидуальным развитием человеческого мозга, что затрудняет выделение некоего «обобщающего шаблона активности +/- 7% на отклонение). Тем более что во время соревнований пилот отвлекается, на него действуют гормоны, например, адреналин, а это также изменяет параметры снимаемых сигналов.
Серьёзной проблемой является то, что необходимо быть постоянно сосредоточенным на какой-то задаче (в данном случае, на управлении), а это сильно выматывает участников. Поэтому одной из проблем, которые должны быть решены, чтобы облегчить инвалидам управление своим киборг-протезом, является предсказание «направления мыслительной активности». В частности, одна из команд под руководством Хосе Миллана (José del R. Millán), специалиста в области нейронаук из Федеральной политехнической школы Лозанны (фр. École polytechnique fédérale de Lausanne), специализируется именно на этом.
Несмотря на серьёзные перспективы, мозговые интерфейсы, возможно, так никогда и не будут массово использоваться в протезировании, поскольку обнаружение и использование мышечной активности осуществить гораздо проще. К тому же развиваются эти два направления параллельно. И все же, если удастся создать дешёвые и довольно точные в плане управления реализации мозговые интерфейсы, они бы могли помочь парализованным управлять инвалидными колясками (или другими средствами передвижения), компьютерами или другими электронными устройствами. Наконец, они позволили бы, используя скайп-роботов, общаться, виртуально участвовать в том или ином собрании. Собственно, уже сама возможность вынести разработки за пределы научной лаборатории означает «наступление будущего», свидетелями которого становятся зрители и участники.
Другие состязания на Кибатлоне должны ещё больше подчеркнуть успехи, достигнутые в области более традиционных протезов. В соревновании ножных протезов участники должны преодолевать всевозможные ступеньки, камни, расположенные в довольно хаотичном порядке, тротуары, расположенные под разным углом наклона, открывать двери, и всё это — встав сначала со стула. Дело в том, что перемещение из положения «сидя» в положение «для ходьбы» является в плане координации движений одной из сложных задач, которая может быть решена разными способами.

Состязание обладателей ножных протезов.
Некоторые участники собираются использовать специализированные «умные колени» и «умные лодыжки», которые будут распознавать микроускорение и корректировать своё движение во время ходьбы, а также в случае, если участник попытается упасть.
И всё же даже самая изощрённая и изобретательная инженерия бледнеет по сравнение с тем, что может любое человеческое тело. К примеру, когда мы берём в руки обычный карандаш, мы совершенно естественно приноравливаемся к его размеру и форме. Наши мускулы «сами регулируют» все необходимые усилия, и кисти в целом, и каждого пальца по отдельности. Периферийная нервная система работает тут в как бы в «фоновом режиме». Человек не концентрируется на совершении какого-либо механического действия, типа «взять тарелку», «вытянуть руку», «нажать педаль» и т. д. Всё это выполняется само собой, в отличие от управления любыми киборгизированными протезами, где приходится прикладывать значительные усилия, чтобы ими управлять. Последнее не способствует популярности и массовому внедрению киборг-протезов, а значит — держит цену на них существенно выше той, которую может себе позволить среднестатистический обыватель.
Для решения этой проблемы исследователи разрабатывают специализированные алгоритмы, которые должны научиться декодировать сигналы мышечной и нервной активности и прогнозировать, что носитель протеза собирается делать. Например, в Барнаби (Канада), расположена кибатлоновская команда M.A.S.S. Impact, пилотом которой является Дэнни Летейн (Danny Letain), бывший канадский лыжник-паралимпиец. Команда сконструировала специализированную панель с плоскими кнопками, которая расположена в месте присоединения протеза к летейновской руке. Используя мышечную память руки, пилот представляет выполнение одного из 11 жестов, например, «указательный». Мускулы в месте присоединения протеза давят на кнопки, чем сообщают искусственной руке, что они «собираются делать». Интересно отметить, что протез позволяет двигать искусственными пальцами, в то время как «настоящими» Летейн не шевелил уже лет 35.
Некоторые ручные протезы ещё более развитые. В Техническом университете Чалмерса (швед. Chalmers tekniska högskola) в Гётеборге, Швеция, Макс Ортиз Каталан (Max Jair Ortiz Catalan) с командой разработали протез, который позволяет двигать им и испытывать тактильные ощущения одновременно (большинство современных протезов реализуют одновременно только одну из этих двух функций). Для реализации этого протез руки присоединён непосредственно к кости носителя, также использованы девять электродов для отслеживания команд, передающихся мотору протеза от оставшихся мускулов руки, а также для передачи сигналов с датчиков пальцев протеза обратно в нервную сеть человеческого тела. Возможность чувствовать объекты во время движения даст, по мнению авторов протеза, конкурентное преимущество пилоту команды, Магнусу Ниске (Magnus Niska).
Команда из американского университета Кейс Вестерн Резерв в Кливленде (Огайо), возглавляемая Рональдом Триоло (Ronald Triolo), исходит из похожей стратегии, которую они надеются применить для FES (функционально-электрические системы) велогонок (750 метров по треку), в которых соревнуются люди с травмами позвоночника. Большинство участников используют электростимуляцию мускулов ног при помощи электродов, закреплённых на коже. Однако кливлендская система, которая была разработана, чтобы помочь ходить при помощи костылей людям с тяжёлыми травмами нижнего отдела позвоночника, предполагает использование имплантированных непосредственно в мускулы ног электродов. Они приводятся в действие внешним устройством, на котором выбирается режим работы мускулов, например, «идти», после чего импланты генерируют импульсы, которые вызывают соответствующую, заранее определённую, двигательную активность (стимулируются соответствующие группы мышц, производится их координация, задаётся периодичность стимуляции и т. д.).
После того как Триоло услышал о Кибатлоне, он решил добавить своему протезу режим «езда на велосипеде». Его команда оснастилась горизонтальным трициклом, снабжённым датчиками, которые отслеживают угол ноги гонщика в то время, когда он жмёт на педали, и автоматически меняют сигналы, стимулирующие паттерны, таким образом, что, когда одна нога жмёт на педаль, другая тянет вторую педаль. Как рассказал Триоло, ему даже пришлось устроить минисоревнование среди тех, кто хотел участвовать в Кибатлоне. В любом случае, он рассчитывает только на победу, а по приезду домой планирует использовать опыт соревнований в качестве трамплина для организации подобных соревнований уже в США.
Цена приза
Сама по себе соревновательность очень далека от того, что движет Рональдом Триоло. Он считает этот принцип мало подходящим, даже глупым применительно к тому, чем он и его коллеги будут заниматься на Кибатлоне. «Скорее мы должны найти путь международного взаимодействия по этим проблемам, нежели чем соревноваться друг с другом», — говорит он, отчасти вторя в этом Ринеру.
Однако, участие в Кибатлоне — это опыт, который не стоит недооценивать. Проведение открытых соревнований будет больше способствовать развитию отрасли, чем научная деятельность в стенах лабораторий. Тем более что открытое соревнование между фирмами и лабораториями приведёт к обмену идеями и к заимствованиям, чего сложно ожидать в условиях, когда исследователи беспокоятся за интеллектуальную собственность и соревнуются за гранты.
Это мнение поддерживает экономист-исследователь Карим Лакхани (Karim R. Lakhani) из Гарвардской школы бизнеса (Harvard Business School, HBS) в Бостоне, который отмечает, что необходимость соревноваться с соперниками заставляет исследователей заканчивать свою работу быстрее и меньше обращать внимание на сомнения, касающиеся возможной экономической обоснованности применения их изобретений. Она же подталкивает закрывать глаза на возможные в будущем технические огрехи. Говоря иными словами, важна, оказывается, не конечная продукция, а худо-бедно работающая концепция или даже макет, который можно продемонстрировать.
В подтверждение этого Лакхани приводит такой пример: автономные роботизированные машины разрабатывались задолго до сегодняшнего дня. Но именно в 2005 году американское Военное агентство перспективных научных исследований (DARPA) провело соревнование (с призовым фондом в два миллиона долларов) имевшихся на тот момент разработок в этой области, к слову — крайне несовершенных. Соревнование приковало внимание нескольких ведущих IT-фирм, одной из которых был Google. Результаты того события десятилетней давности можно видеть в постоянных сообщениях об очередных прорывах в области автономных роботизированных машин (включая грузовые машины). Что касается Google, они уже приступили к тестированию робокаров собственного производства.

Мэтт Стандридж (Matt Standridge) будет пилотировать на Кибатлоне управляемый неинвазивным интерфейсом мозг — компьютер экзоскелет, разработанный в Хьюстонском университете (University of Houston).
Весьма вероятно, что Кибатлон послужит той же цели: привлечёт внимание к отрасли и её проблемам, новинкам, разработкам. Хотя призового фонда у соревнований нет, выдаются только медали, исследование Лакхани позволяет заключить, что такого рода соревнования сами по себе могут отлично мотивировать участников. Возможно, лучшей наградой для многих малоизвестных команд будет возможность посоревноваться с крупными и топовыми фирмами, считает Лакхани. Кибатлон в этом плане даёт отличный шанс, так как привлекает и тех, и других. К примеру, одним из участников будет Otto Bock HealthCare, европейская многомиллиардная компания из Дудерштадта, один из крупнейших мировых производителей протезов конечностей. Она примет участие в трёх соревнованиях, одним из которых будет соревнование экзоскелетов. В нём участники с травмами позвоночника будут использовать экзоскелет для преодоления препятствий. Пилот фирмы Люсия Курс (Lucia Kurs) из-за опухоли позвоночника не могла пользоваться своими ногами. Но, при помощи экзоскелета она теперь проходит 12 км. При помощи датчиков, электромоторов и контроллеров механические лодыжки и колени экзоскелета позволяют симулировать обычную человеческую походку. Понятное дело, что для фирмы это соревнование — отличная возможность показать, на что способны её аппараты, но, кроме того, это и возможность присмотреться к конкурентам или даже к «тёмным лошадкам» из университетов. Да и не только к ним. Например, Хесус Тамес-Дюке (Jesús Tamez-Duque) представляет небольшой мексиканский стартап INDI Ingeniería y Diseño из города Монтеррей (Мексика). Экзоскелет мексиканцев гораздо дешевле супердорого от немецкого конкурента (75 тысяч долларов). Движущиеся части мексиканского экзоскелета приводятся в действие моторами от автодворников, а большинство частей изготовлено при помощи 3D-печати. Джойстик, прикреплённый к экзоскелету, позволяет выбрать его режим работы — например, садиться/сидеть или взбираться вверх/спускаться вниз по лестнице.
Интересно отметить, что автор этого экзоскелета надеется не только найти будущих сотрудников, но и доказать, что его страна может быть игроком на этом поле. Хотя Кибатлон рассматривается многими в качестве соревнования между топовыми лабораториями в области робототехники, участники вроде мексиканского стартапа приближают решения в области протезирования к широкому потребителю, которому просто не по карману платить десятки и сотни тысяч долларов за «лучшее в мире» решение. Если же решение будет рабочее и дешёвое, а главное массовое и тиражируемое — это пойдёт отрасли только на пользу, заставляя ведущих игроков снижать цену (хороший пример — рынок потребительской электроники, компьютеров, смартфонов, планшетов, автомобилей и т. д.)
В будущем проведение Кибатлона думают совместить со временем проведения Токийской олимпиады, которая пройдёт в 2020 году. Кроме уже упомянутых выше соревнований, появятся новые — для слабовидяших и имеющих иные нарушения зрения. Кроме того, часть соревнований пройдёт вне стадиона. Правда, участники нынешнего Кибатлона и без этого в восторге от происходящего, ведь для многих из них это сродни соединению «Железного Человека» комикс-вселенной «Марвел» и «Аватара» Джеймса Кэмерона.
7.10.2016 Источник: 22century.ru
Автор — Ольга Таболина.




 Марк Хэммонд в штаб-квартире Bonsai в пригороде Беркли
Марк Хэммонд в штаб-квартире Bonsai в пригороде Беркли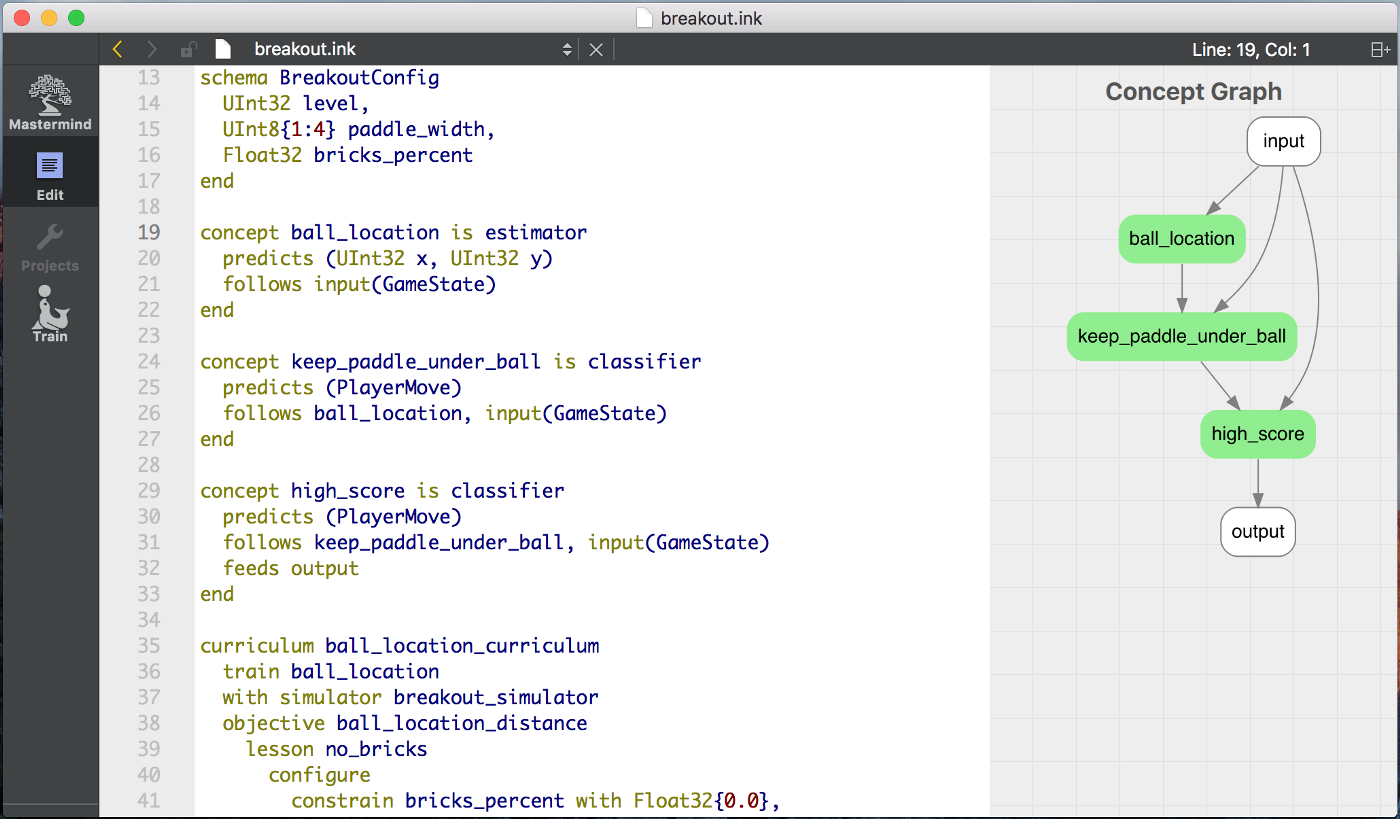 37 строк кода создают нейросеть, обучающуюся играть самостоятельно
37 строк кода создают нейросеть, обучающуюся играть самостоятельно